



Seeing the Bigger Picture: LiDAR Mapping and the Evolution of Rafeq
The process of debugging daily work activities makes it difficult to track the progress of a project. But stepping back to see the bigger picture is crucial. Every small technical hurdle you clear is a major achievement, and recognizing those milestones is what keeps the momentum alive.
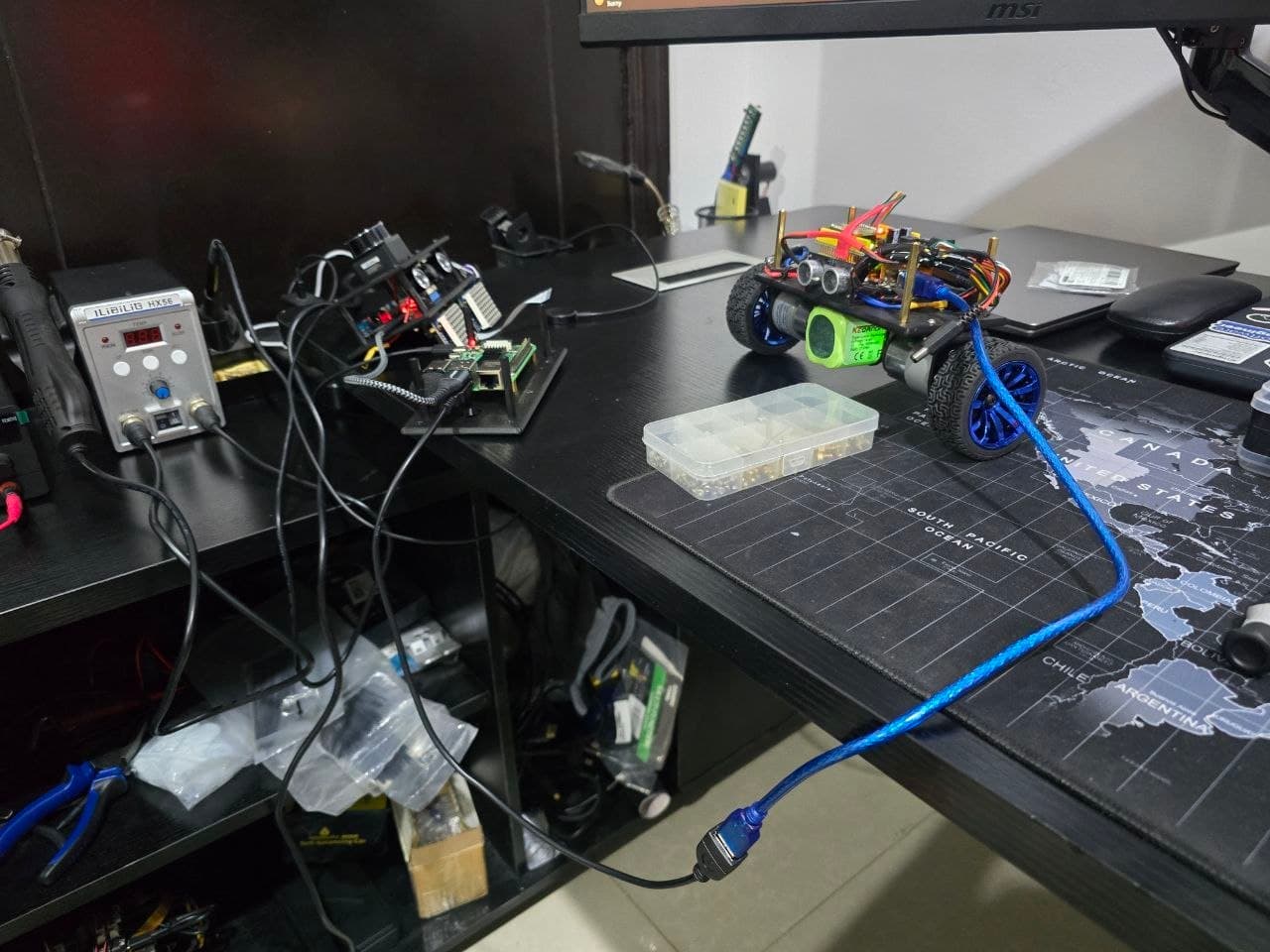
I achieved a major milestone with Rafeq during my recent work. I needed to break down and build from scratch different robot sections to solve the performance issues which appeared when multiple hardware components operated together.
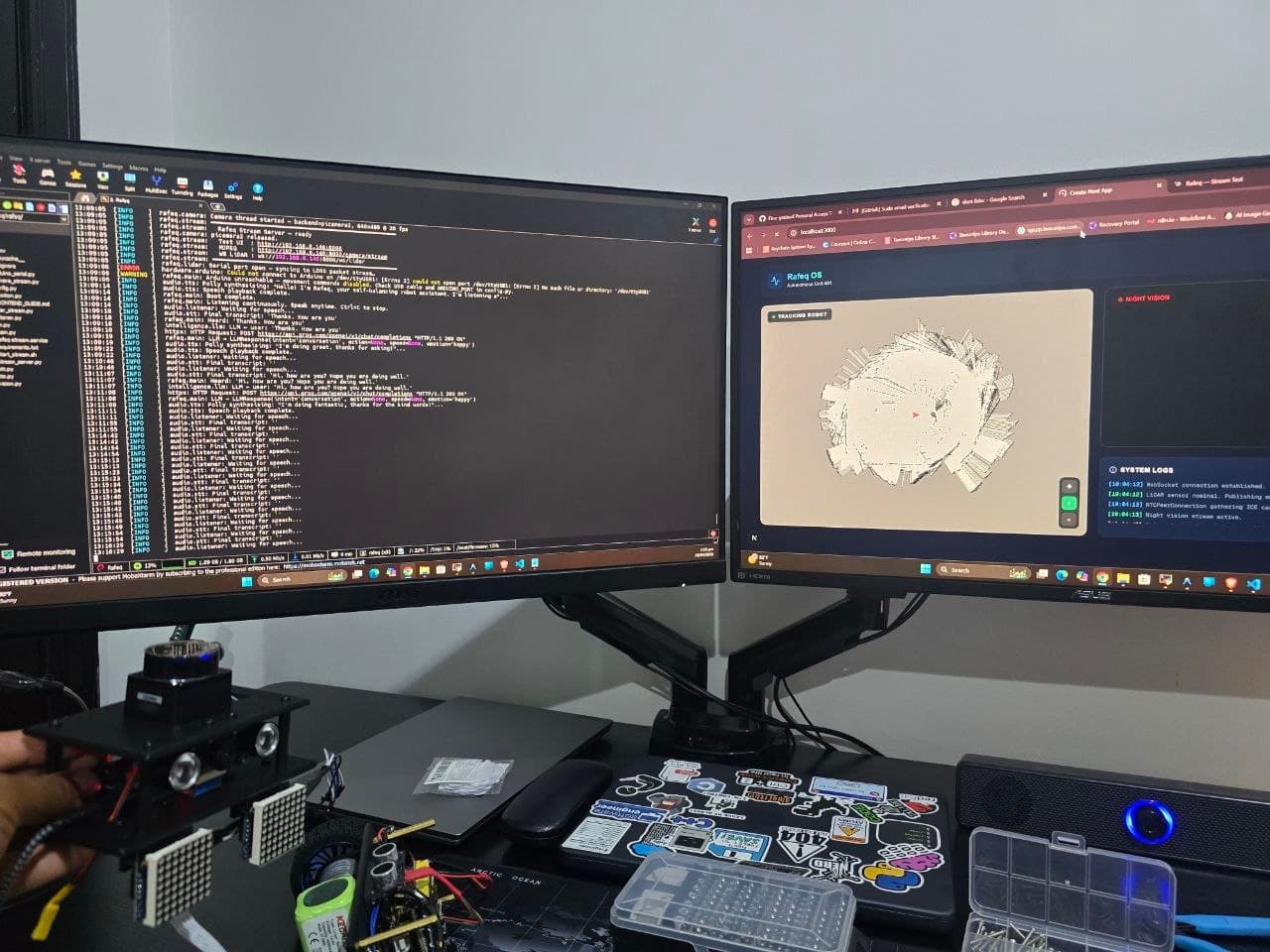
The hardware reached its final form. This allowed me to link the LiDAR sensor directly to the Raspberry Pi board. To bring this to life, I built a data pipeline using WebSockets to stream the LiDAR telemetry straight to a frontend application. The screenshots below demonstrate how Rafeq now produces an active map which displays its real-time position in the environment.
The current phase of the build requires me to separate all components before I connect them together, and perform extensive testing on each unit. I will present my building process through upcoming posts which will reveal the technology I used, and the system design and physical components that enable its operation.